Internationale Partnersuche
Innovation & Technologie Angebot
Advantageous bi-directional pneumatic braided muscle actuator ready for demonstration and patented
Country of Origin: Italy
Reference Number: TOIT20180726001
Publication Date: 26 July 2018
Summary
A leading ltalian biorobotic Institute offers a patented pneumatic braided muscle actuator, able to produce bi-directional force and motion, and variable stiffness. Fields of application are many ranging from healthcare to industrial automation. The technology is offered to enterprises interested in industrialising it or in applying this advantageous solution to its products with a joint venture, license or research and technical cooperation agreements.
Description
A leading Italian biorobotic Institute has developed a bi-directional pneumatic braided muscle actuator.
Existing/traditional pneumatic muscle actuators have a fixed braid fiber angle and are usually able to produce a pulling uni-directional force when actuated. Conversely this actuator is able to achieve variable stiffness depending on the braid angle.
Pneumatic muscles are generally preferred thanks to their high power to weight ratio, light weight, ease of installation, hazard-free use and inherent compliance.
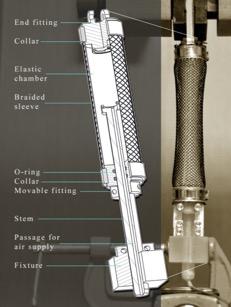
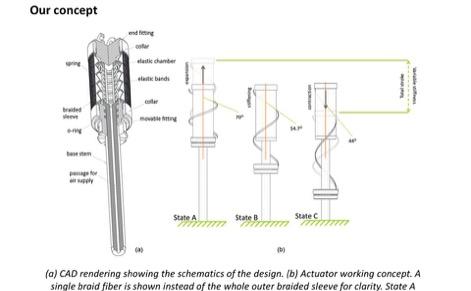
Pneumatic artificial muscles usually consist of a hollow cylindrical elastomeric chamber covered by an outer braided sleeve, consisting of fibres made of un-stretchable material and arranged in an anti-symmetric helical configuration. The hollow internal chamber and the braided sleeve are tightly sealed and attached to rigid end fittings, a passage is provided through one of these end fittings for pressurizing the elastic chamber. The mechanical work done is transferred to an external system through these end fittings. The working principle of the Bi-directional actuator is based on the traditional pneumatic muscles but some fundamental changes enables the user to change the initial braid fiber angle independently. Depending on the braid angle, the actuator is able to produce extension and contraction upon pressurization, moreover the ability to change the initial braid fiber angle enables the actuator to achieve variable stiffness at each point along the total stroke of the actuator, whereas the traditional pneumatic muscles lack this ability.
Advantages and Innovations
The pneumatic braided muscle is based on the traditional Mc-Kibben actuator but some fundamental changes to the design, enables the user to change the initial braid fiber angle θ independently, hence achieving bi-directional motion and force upon actuation.
The ability to change the initial braid fiber angle enables the actuator to achieve variable stiffness at each point along the total stroke of the actuator, whereas the traditional Pneumatic Artificial Muscles (PAMs) lack this ability.
ADVANTAGES:
• Inherently compliant (good for human/ machine interaction from safety point of view).
• High power to weight ratio.
• Bi-directional force and motion.
• Able to achieve max and variable stiffness at each point along the total stroke of the actuator.
• No precise alignment required during installation due to the flexible body of the actuator.
APPLICATIONS:
• Rehabilitation robotics: robotic prosthesis or rehabilitation devices,
• manipulation, locomotion, industrial automation,
• automatic control of valves,
• single revolute joint resulting in light weight designs, where the muscle can also be used to control the stiffness of the revolute joint.
Stage Of Development
Prototype available for demonstration
Stage Of Development Comment
Prototype 3 was tested in lab environment and through Finite Element Modeling (FEM), a 40/80N Force was exherted, in terms of expansion and contraction, in response to 1bar pressure.
In terms of displacement, an overall stroke of of >40% of the total length of the actuator was obtained.
Such Force displacement is compatible with the force exerted by a couple of antagonistic pneumatic actuator, to support 10 kg of a robotic arm of an exoskeleton that assists a worker, e.g. in the automotive sector.
It was also tested as a main driver for a variable stiffness joint based on a 4-bar mechanism, able to convert the linear motion of the muscle into rotational motion of the joint. In this configuration the bi-directional muscle acts simultaneously as the main driver for the mechanism and as a damper -energy dissipating medium- in case of an impact loading on the joint.
Requested partner
The technology is offered to enterprises (working in automotive, transports, logistics, rehabilitation devices, orthopedic devices sectors) interested in industrialising it or in applying this advantageous solution to its products.
Cooperation offer ist closed for requests