Internationale Partnersuche
Innovation & Technologie Angebot
System for reliable detection of occupancy of parking spaces
Country of Origin: Spain
Reference Number: TOES20180907001
Publication Date: 11 September 2018
Summary
An electronic engineering research group from a Spanish university presents an artificial vision system with telemeter, which combines the information from a video camera and an steerable telemeter, to inform and guide the user when finding a parking space regardless of the vehicle type or size or the environmental conditions. The research group looks for license agreements, collaboration agreements or commercial agreements with technical assistance with public administrations and carparks
Description
Currently, there is no reliable detection system for the occupancy of parking spaces, so the combination and proper treatment of the information from a video camera and a steerable telemeter as proposed in this invention, represents an advance in obtaining the occupancy of the parking spaces.
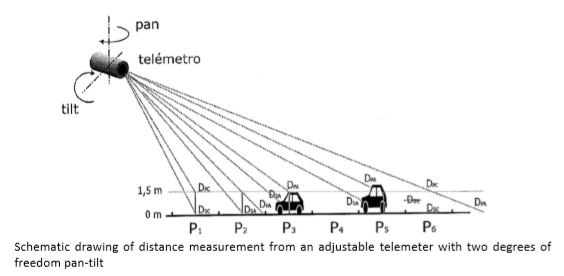
An electronic engineering research group from a Spanish university has developed system including a device that obtains the occupation status of each of the parking spaces within the area supervised by a sensor node that is composed of a video camera, a laser telemeter on a pan-tilt platform and a processing algorithm.
Its main features are the following:
- Camera and telemeter on a pan-tilt movement platform, as a single set of remote sensing for the detection of the occupation status of the parking spaces.
- Calibration in the installation to guide the system conveniently to the different squares of the supervised parking area.
- Algorithm of data fusion and its application to the detection of occupation of parking spaces: identification of empty spaces; vehicle entry / exit detection; fusion of video and distance data to indicate the occupation status of a place.
Once the parking occupation has been detected entirely, the system can guide the driver through his mobile phone, through an application to be developed.
The research group is looking for town halls and companies who are interested in optimizing the use of existing infrastructure and vehicles to make parking more efficient. The cooperation types would be collaboration agreements, commercial agreements with technical assistance or license agreements.
Advantages and Innovations
The novelty of the patent is mainly in the combination of the information obtained from both systems: image of the square, recognition of the space (floor) that corresponds to each parking space, detection of movement of a car in an area in the sequence of images that can mean that it occupies or leaves free a parking space close to a particular area, and the measurement of distances to the parking spaces of interest of the affected area, so that there are results of occupation of parking spaces more reliable, allowing its use in surface parking systems.
The new system includes a new distance measurement device, merging the video and distance measurements to provide an appreciable improvement in the detection of occupied spaces.
The requirements of the supervision in a parking make the use of an adjustable telemeter suitable, and can be added to the supervision cameras that currently exist with the linked cost reduction compared to current systems.
Stage Of Development
Under development/lab tested
Requested partner
The research group is looking for town halls with the aim of establishing an intelligent urban parking management system in order to achieve sustainable mobility in urban areas. The collaboration type would be commercial agreements with technical assistance.
In the same way, companies in charge of the management/administration of car parks to license agreements or collaboration agreements are also sought. These partners are expected to offer a great added value in the development of an application that combines the knowledge of free spaces and the vehicle movement through the parking.t can provide the right indications to the users, guiding them to find a free space to park.
Cooperation offer ist closed for requests